Blog
Full Size R2-D2 Remote Control (Raspberry Pi)

I’ve had so many people ask me how I went about building the full size R2-D2 remote control system. So today, I will take you through what I have done so far and what I plan to do in the future. When I first started my R2-D2 building adventure I read all the R2-D2 forums and Reddit posts on how others have done it. What I found was a little disappointing. Most of the builders were just rehashing 10 year old plans that others had made using model airplane remote control systems. I wanted to put together something much more modern that I could build on and have APIs for integration into other things.
For example, I wanted my home automation system to be able to do things with R2-D2 like wake him up or turn him off. R2-D2 is going to live in my theater room and I wanted him to come alive and go to sleep before and after movies but to be silent during them. The best way to do this is to have some sort of computer or micro-controller inside him.
Full Size R2-D2 Control System Video
Raspberry Pi Controlled R2-D2
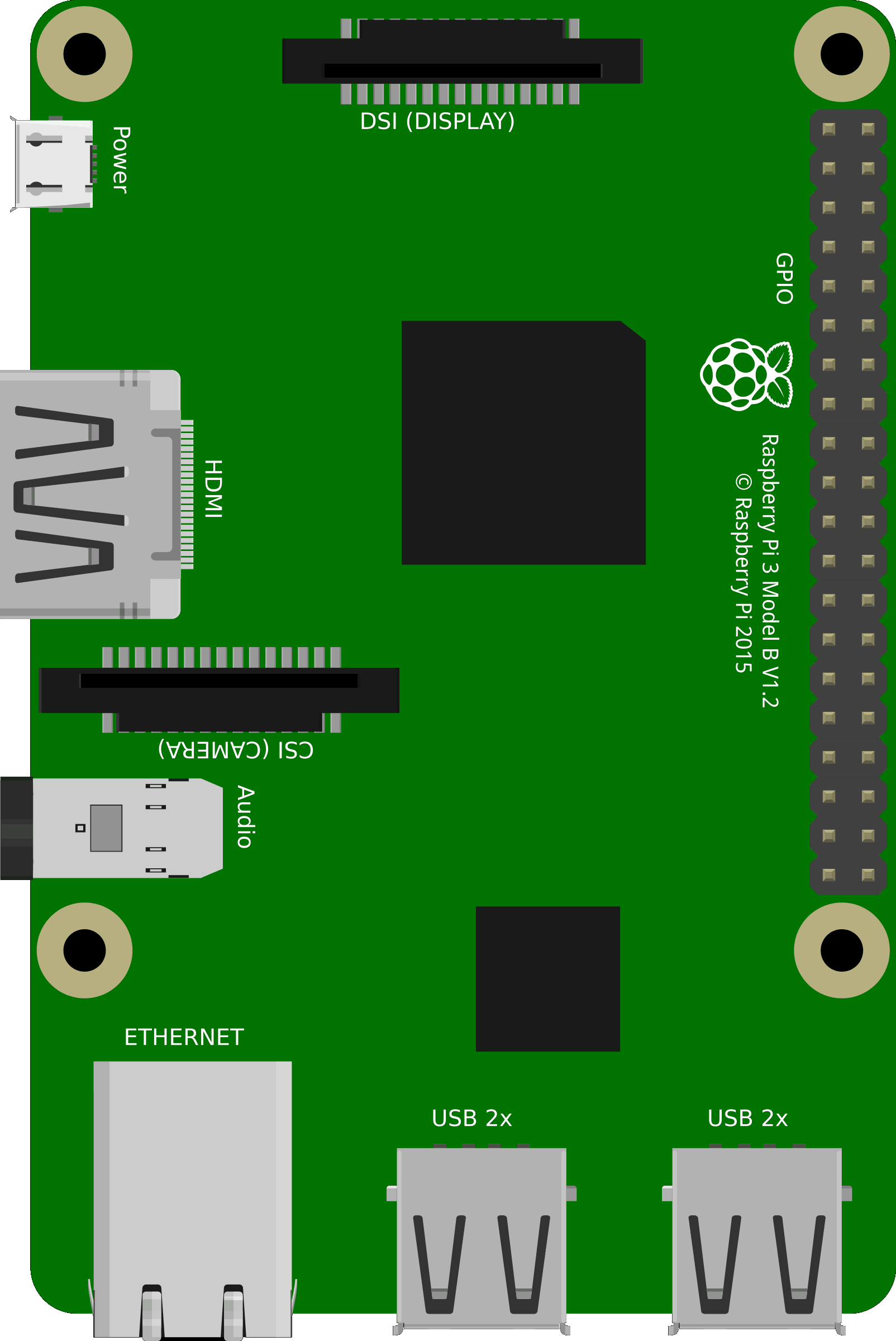 I ultimately landed on the
I ultimately landed on the
- Low Power – The Raspbery Pi is a lower power device. Since R2-D2 is battery operated, saving power is critical. A full size PC was just not going to be an option for something that I hope to run 8-12 hours on a single charge.
- GPIO – The RPi has GPIO for controlling servos, relays, and other device.
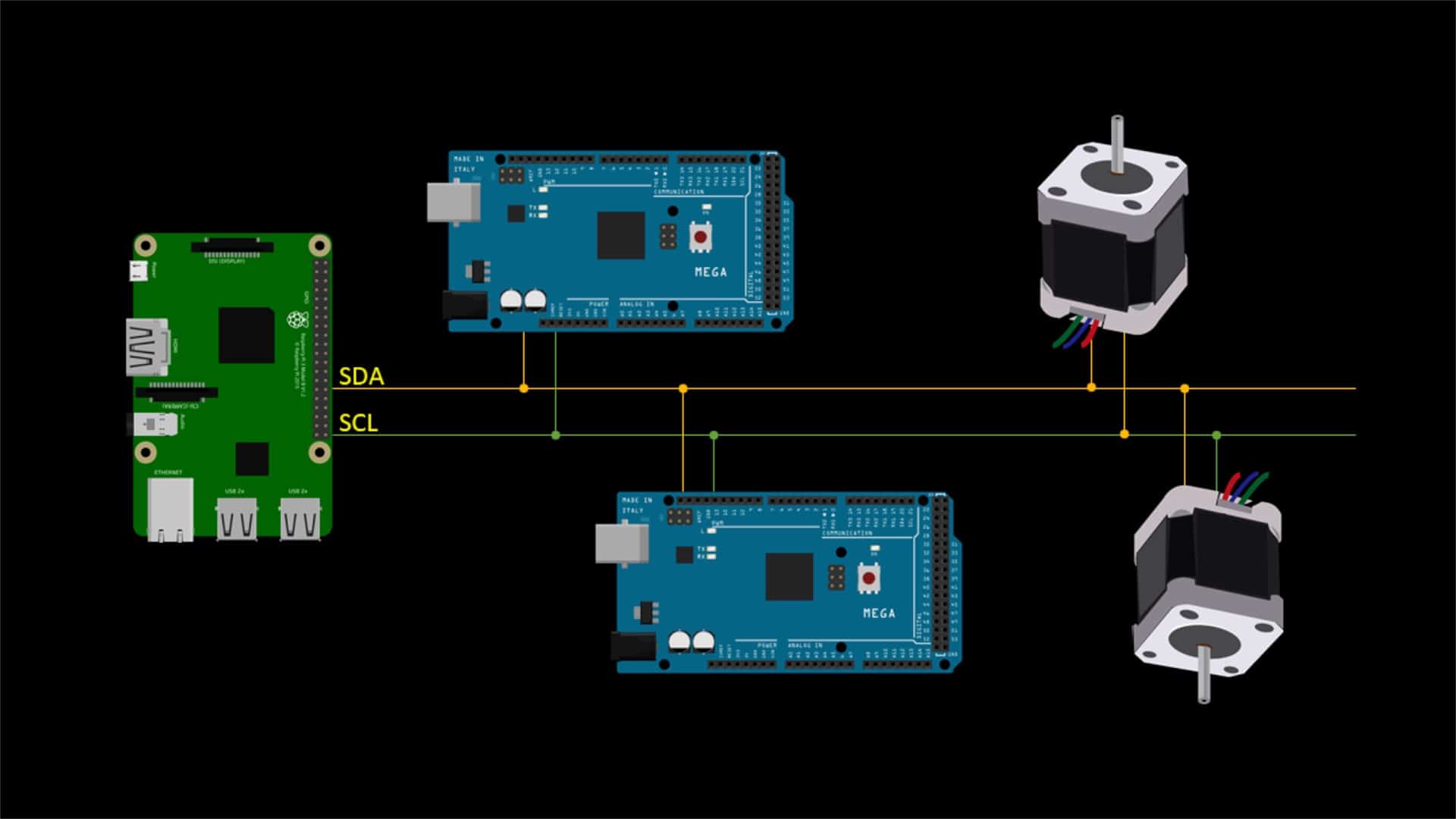
- I2C – The I2C protocol is a serial bus protocol that allows multiple devices to talk to each other over just two wires. This means I can control Arduinos, motor controllers, and anything else that supports I2C remotely.
- Bluetooth – Since the RPi has integrated Bluetooth, I can use a Playstation 3 or XBOX One game controller with the Raspberry Pi to drive and operate R2-D2.
- Wi-Fi – With Wi-Fi on the RPi I can have R2-D2 on my home network and also develop iOS and Android applications to control him.
- Python – With Python programming I can simply automate and control R2-D2 and make changes to how he operates quickly and without much development effort.
There are however some downsides of using a
- Reliability – Let’s be honest. Computers crash and software has bugs. It’s certainly possible I will have programming and stability issues with the full size R2-D2 remote control system running on a
Raspberry Pi . Time will tell, but I hope it will be rock solid. - Complexity – This type of system adds a lot of complexity that average DIYers might not be able to do themselves. After all I am writing the Astromech Operating System to control R2-D2. Clearly not everyone can do this.
Initially when I dreamed this up I somehow had it in my mind that I would just need a single
Arduino Controlled R2-D2
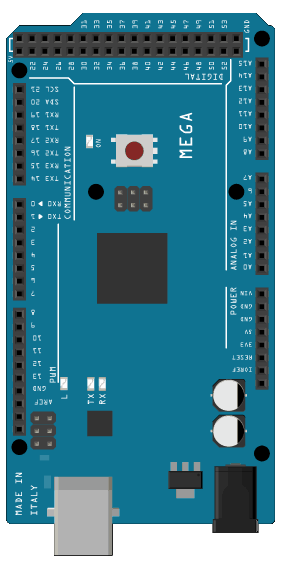 Enter the Arduino Mega 2560. This device basically an expanded Arduino Uno and is based on the ATmega2560 micro-controller. It has a whopping 54 digital I/O pins. I placed one of these in the dome of R2-D2 and another one in the body. For now I think that will be plenty. However, since they are connected over I2C adding additional Arduino’s is super easy should I ever decide I need to do this.
Enter the Arduino Mega 2560. This device basically an expanded Arduino Uno and is based on the ATmega2560 micro-controller. It has a whopping 54 digital I/O pins. I placed one of these in the dome of R2-D2 and another one in the body. For now I think that will be plenty. However, since they are connected over I2C adding additional Arduino’s is super easy should I ever decide I need to do this.
The Arduinos also offer something that the
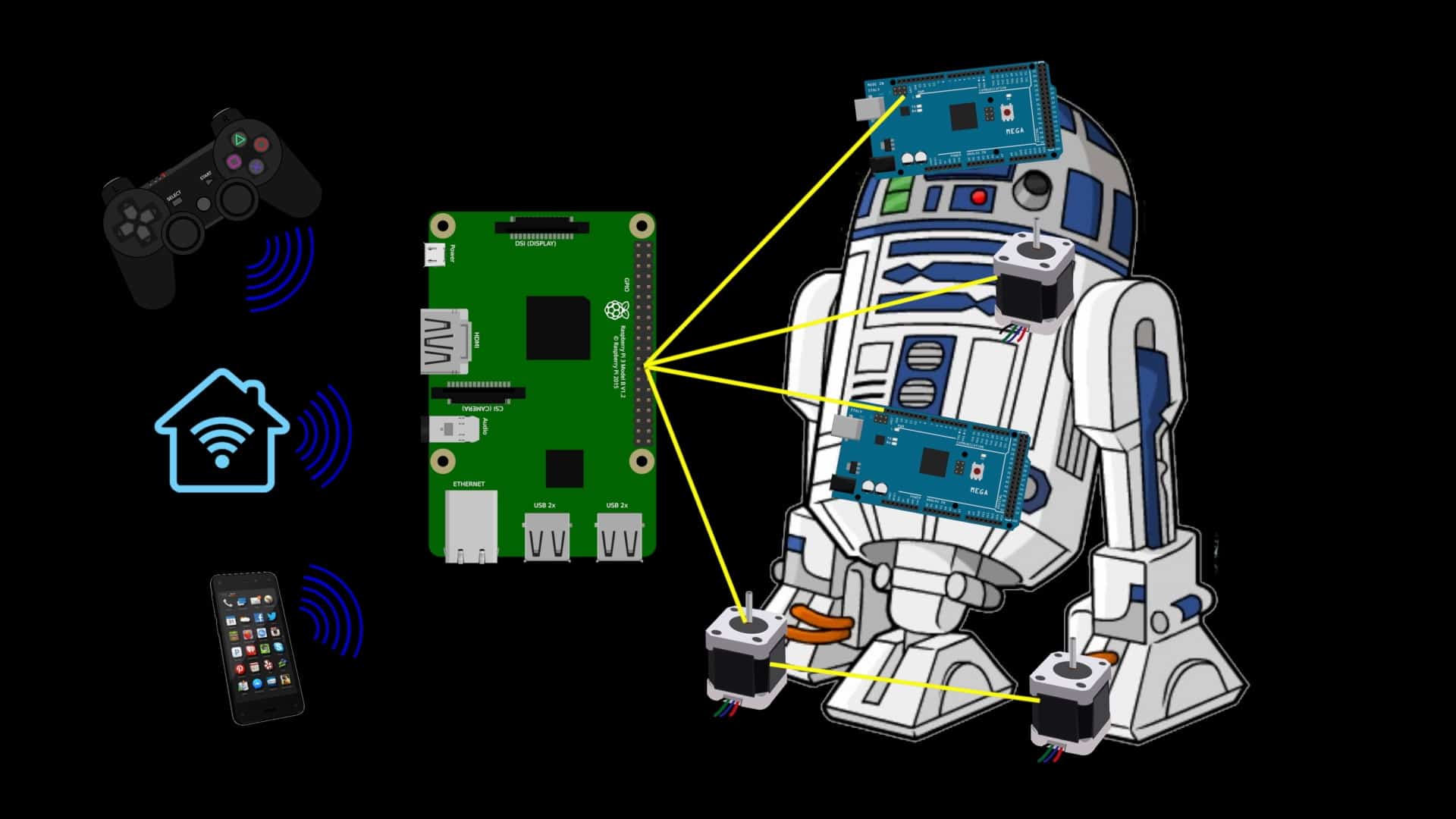
Full Size R2-D2 Remote Control System
So let me show you what I have created. I think you’ll find this at least somewhat useful if you decide to build your own. Inside R2-D2 is a master brain if you will, and connected to it are multiple Arduinos, motor controls, etc. over the I2C bus. The Raspberru Pi is responsible for controlling and monitoring everything within the R2-D2. However, for certain things, it just sends commands (more on that further down) to slave devices and they are responsible for executing on their own. For example, the RPi send a command to the dome motor controller over I2C to turn left at a speed of 100. The motor controller is expected to keep the dome spinning left until it receives another command to do something different.
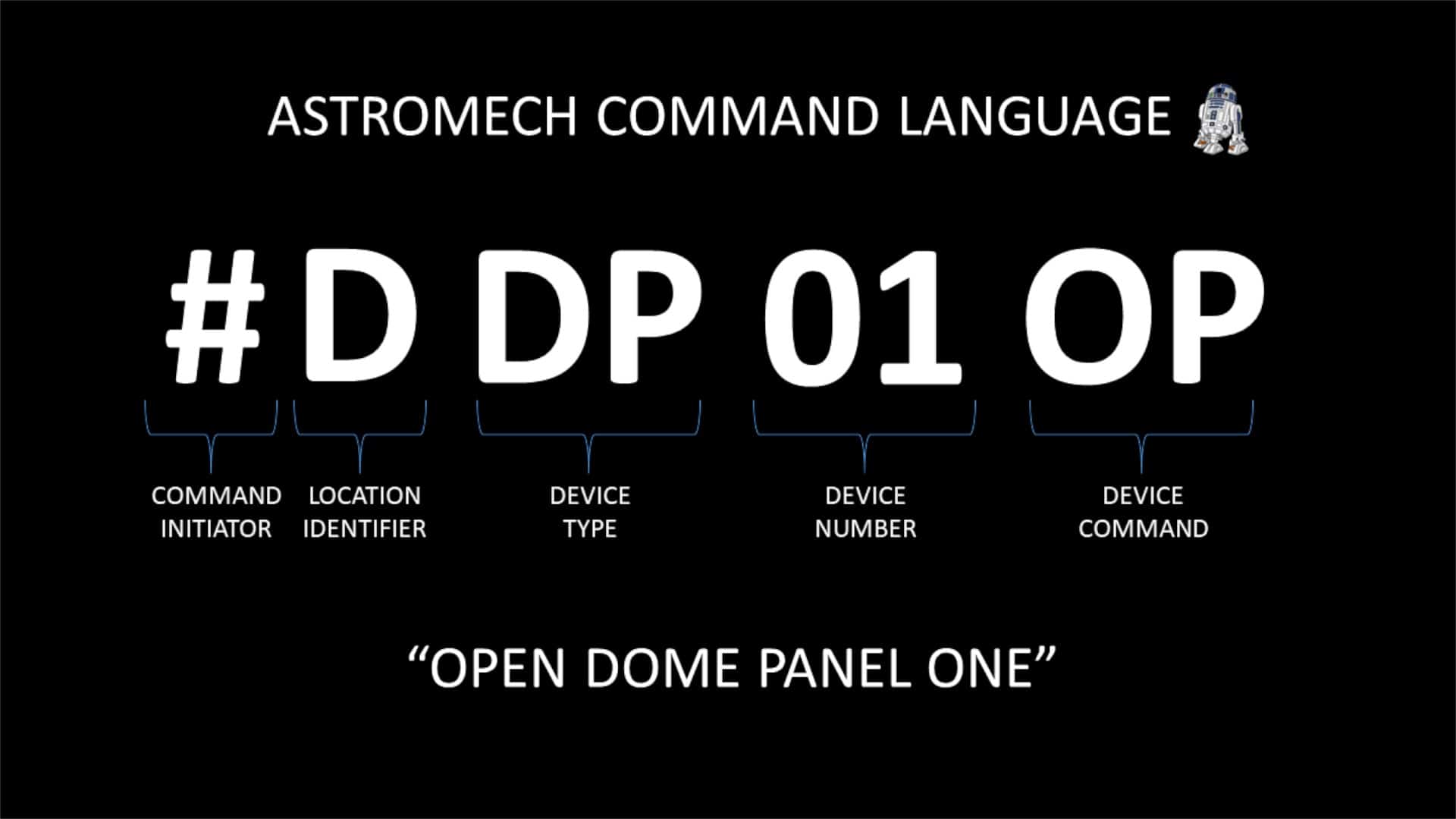
Astromech Command Language
In order to make all of this work simply, I created something called an Astromech Command Language. It’s very simple. Within the Astromech core software is a mapping file that maps each command to a button, sensor, or other input. When a button is pressed the RPi will break the command down and process it.
Every command starts with a # (or hashtag for you young people). Following that is a single letter that designates something specific. D for dome, B for body, M for media, and Z for motor controller. I’m sure I will add more as I go. I’ve just recently added S for a sequence of commands so I can make R2-D2 do little shows.
Followed behind the command is a string of parameters. For example #DDP01OP is the command to open dome panel one.
 Eventually there will be an API to allow literally anything (via authentication) to command R2-D2 to do something. This could be a home automation system, an iOS or Android app, or even a webpage. All without any need to understand how R2-D2 works internally.
Eventually there will be an API to allow literally anything (via authentication) to command R2-D2 to do something. This could be a home automation system, an iOS or Android app, or even a webpage. All without any need to understand how R2-D2 works internally.
Here some examples of other commands:
- #DHP02CT – Center Holoprojector 2
- #BDD+055 – Turn the dome left at a speed of 55
- #M010 – Play Media file 10 (a song)
- #BBP05– – Toggle body panel 5 (if its open, close it / if its closed open it)
- #S004 – Run a sequence of commands – Allows me to combine a sequence of commands with music so R2-D2 can “dance”
At some point in the coming months I will be open sourcing my Astromech Operating System to anyone who wants to use it help me expand it. For now, it’s in too much of a state of disarray to do so. Far too early in its development cycle.
If you’d like a tour of my R2-D2, see the video above. I give a complete tour at the end of the video. If you’d like to read more about my R2-D2 Build you can see them all here. You might also find the R2-D2 Parts List helpful.
[convertkit form=939012]






5
Looking stellar ! Bwahaha
This is just genius! I can’t wait to see where this goes!
Bad ass. If you open source this R2-D2 stuff I am def going to use it.
Any updates on this? When do you plan to release it?
It may be many months unfortunately, but it will eventually be released!
Hi Mike, have you released this amazing project to OpenSource by now? Would love to use it for my first droid that I’m building.
you can use also PS4 dualshock 4 with RPi, always with bluetooth, btw great project!! Cant wait for the release!!
are we going to see an update on this or has it been abandoned?
He’s almost complete, I’ve just not had time to update the blog in a few months due to work and family commitments.
Mike, I just discovered your channel thanks to your brother. Interesting topics. I am working as IT developer but I am jealous of your hardware. And what kind of power consumption do you have? Anyways, thanks for the nice video’s, keep up the work.
I am working on designing my modeltrein layout. Want to use Raspberry and arduino’s with i2c. Your rpi sends to the slaves but get it status updates back from the arduino slaves. Or is it send and hope that de arduino reacts the way you want?
Again, thanks and greetings from Holland,
John
Hey I just discover your proyect!
Any update on that?
I would also love to know if you have open source this yet?
Any update on the project? or is it dead? :/
It’s on a very long term hold.
Any advancement on this project I recently found you in the middle of building my own droid. Would love to adapt your system to it. If you have all the plans and guidelines for this I will be upgrading to your premium!
Any update on this project? Looks like you shelved this.